
基本情報技術者講座
★ 猫本 3-08 計測と制御(その2) ★
基本情報技術者 平成29年度秋期 問22
アクチュエータの機能として,適切なものはどれか。
| ア | アナログ電気信号を,コンピュータが処理可能なディジタル信号に変える。 |
| イ | キーボード,タッチパネルなどに使用され,コンピュータに情報を入力する。 |
| ウ | コンピュータが出力した電気信号を力学的な運動に変える。 |
| エ | 物理量を検出して,電気信号に変える。 |
解説
| ア | A/Dコンバータ |
| イ | 静電容量式センサ |
| ウ | アクチュエータ(正解) |
| エ | センサ |
解答
ウ
基本情報技術者 平成30年度春期 問21
アクチュエータの説明として,適切なものはどれか。
| ア | 与えられた目標量と,センサから得られた制御量を比較し,制御量を目標量に一致させるように操作量を出力する。 |
| イ | 位置,角度,速度,加速度,力,温度などを検出し,電気的な情報に変換する。 |
| ウ | エネルギー発生源からのパワーを,制御信号に基づき,回転,並進などの動きに変換する。 |
| エ | マイクロフォン,センサなどが出力する微小な電気信号を増幅する。 |
解説
| ア | フィードバック制御 |
| イ | センサ |
| ウ | アクチュエータ(正解) |
| エ | アンプ |
解答
ウ
基本情報技術者 平成29年度秋期 問3
フィードバック制御の説明として,適切なものはどれか。
| ア | あらかじめ定められた順序で制御を行う。 |
| イ | 外乱の影響が出力に現れる前に制御を行う。 |
| ウ | 出力結果と目標値とを比較して,一致するように制御を行う。 |
| エ | 出力結果を使用せず制御を行う。 |
解説
| ア | シーケンス制御 |
| イ | フィードフォワード制御 |
| ウ | フィードバック制御(正解) |
| エ | フィードバック制御:出力結果を使用し,目標値とを比較して,一致するように制御を行う。 |
解答
ウ
基本情報技術者 平成29年度春期 問21
変形を感知するセンサを用いると,高架道路などの状態を監視してメンテナンスすることが可能である。この目的で使用されているセンサはどれか。
| ア | サーミスタ |
| イ | ジャイロ |
| ウ | ひずみゲージ |
| エ | ホール素子 |
解説
| ア | 温度変化を感知するセンサ |
| イ | 角速度(時間あたりの角度の変化量)を感知するセンサ |
| ウ | 物体のひずみ(変形)を感知するセンサ(正解) |
| エ | 磁力を感知するセンサ |
解答
ウ
基本情報技術者 平成29年度秋期 問4
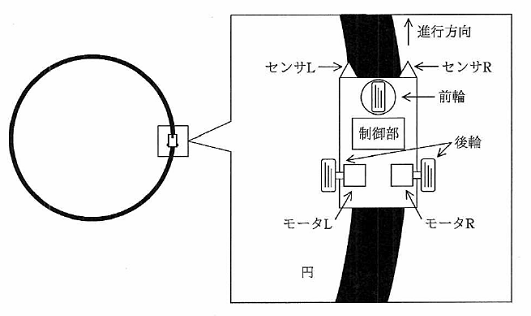
図のような黒色で描かれた円に沿って車が走るように,左右の後輪に独立に取り付けられたモータL及びRの回転速度を制御する。センサL及びRは反射型光センサであり,センサが黒色に掛かる比率が大きいと出力値が小さくなり,黒色に掛かる比率が小さいと出力値が大きくなる。この車を円に沿って走行させるためのモータ回転速度の制御方法として,適切なものはどれか。ここで,二つのセンサの出力値が一致するときには,二つのモータの回転速度を初期値に戻すものとする。
解説
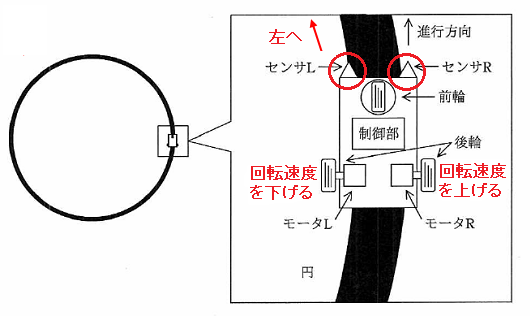
「センサが黒色に掛かる比率が大きいと出力値が小さくなり,黒色に掛かる比率が小さいと出力値が大きくなる。」ことから,
上図から,
「センサL出力値<センサR出力値」の関係にあり,その場合は「進行方向」に向かって,左に動かす必要がある。
左に動かすためには,「モータL回転速度を下げる」,「モータR回転速度を上げる」必要がある。
また,右に動かす場合はその逆である。
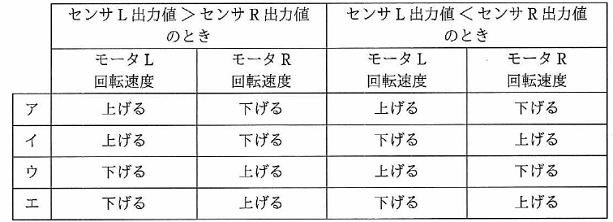
よって,イである。
解答
イ